
Petrosilius und Max haben den Hackathon in Berlin organisiert um mit Hilfe von Computer Vision Boote auf Bildern für zivile Such- und Rettungsoperationen zu finden. Sie haben um Hilfe gebeten und über 50 Freiwillige sind nach Berlin gekommen um SearchWing zu unterstützen und sich mit Bildverarbeitung und Maschinenlernen zu befassen. Vielen Dank an alle, die gekommen sind, an Mustafa und Winston von Deep Berlin für den schönen Ort, die Getränke, das Essen und den Grillabend, an Geraldine de Bastion für die Moderation und alle anderen, die uns geholfen haben.

Petrosilius gab eine Einführung in die Problematik und die Teamaufteilung. Die SearchWing Drohne macht ungefähr jede Sekunde ein Foto und die allermeisten Bilder zeigen nur Wasser. Bislang werden die Bilder manuell auf einem Laptop gesichtet. Es wäre ein große Hilfe, wenn diese Suche durch Computer Vision zumindest unterstützt werden könnte. Wenn die Bildklassifikation auch während des Fluges auf einem Computer im Flieger durchgeführt werden könnte, dann könnte das Team auf dem Schiff schneller auf die Situation reagieren.

Mehr als fünfzig Freiwillige habe am Hackathon teilgenommen.

Die ganze Veranstaltung fand in „The Drivery“ statt, die im Ullsteinhaus in Berlin angesiedelt ist.

Ein wunderbarer Platz für Hipster jedweder Art. Es gibt dort Küchen, ein „gym“, Plätze zum Abhängen und

Bildschirme um alle möglichen Sachen zu machen. Essen, Getränke und der Ort wurden von Deep Berlin zu Verfügung gestellt.

Auf der Dachterrasse gab es am Freitag zur Begrüßung und zum Kennenlernen ein Grillfest.
Schon beim Grillfest liegen die ersten Veröffentlichungen auf dem Tisch.

Am Samstag sind wir mit einem Frühstück um 9 gestartet. Die Teams haben dann im „Hackathon Room“ angefangen. Dort gibt es Tische für die verschiedenen Teams, die mit Pflanzen getrennt sind. An den Tischen stehen auch Bildschirme zur Verfügung, die man an seinen Laptop anschliessen kann.

Es gibt dort auch einen NVIDIA DGX GPU server, der von Petrosilius mit Dockerimages für die Teams vorbereitet war. Ein NVIDIA support Ingenieur war auch vor Ort und hat bei Problemen geholfen. Nochmals vielen Dank auch für diese Hilfe.

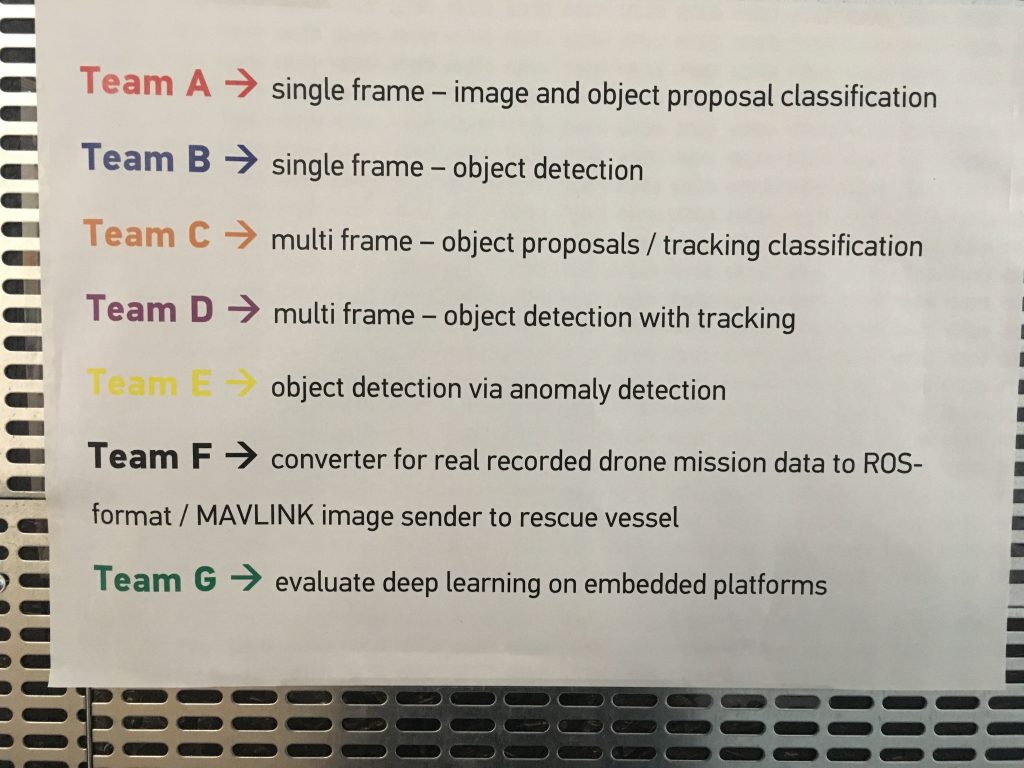
Es waren sieben Teams geplant, aber es gab keine Interessenten für Team G und Team F war ein Ein-Mann-Team. Die Mehrheit der Teilnehmer hat sich eher für Bildverarbeitung und Maschinenlernen interessiert.
Am Sonntag morgen gingen die Arbeiten weiter. Die Abschlusspräsentationen von den Teams begannen um 15.00 Uhr. Während der Präsentation waren alle Teammitglieder mit auf der Bühne. Dieser Bildschirm ist übrigens kein Beamer sondern ein echter Bildschirm…







SearchWing Augsburg wird eine Community für alle Teilnehmer einrichten, die uns auch in Zukunft noch unterstützen möchten. Im Augenblick sind wir noch dabei die Ergebnisse vom Hackathon zu sichten und zu ordnen. Der Plan sieht so aus:
- Eine mailing liste der SearchWing Computer Vision Gruppe
- Ein github repository wo die Ergebnisse zusammengetragen werden
- Regelmäßige Telefonkonferenzen und echte Treffen in Berlin
Allerdings wird Petrosilius nach den Vorbereitungen und dem eigentlichen Hackathon für die nächsten vier Wochen einfach Schlafen.