
In February this year, the Searchwing team took off to Malta, or more precisely the smaller island of Gozo for a development camp. The main goal was to test our planes under mission conditions – the mediterranean sea.
The team consisted of the core members of the Augsburg group. We packed not only 2 complete planes, Platschi and Freddy, but also a lot of spare parts, tools and 2 planes as parts.

Accommodation
We had rented a house there, so all of the team – 8 people all together – could work and discuss and spend time together! Other than expected: Gozo was cold! If you travel from Germany in February south, you always assume you are entering the paradise temperature wise. This assumption was wrong!

There was a time, we had to all gather in front of the open cooker not to freeze any limps off!
But that didn’t stop us from working and getting a lot of stuff done!
First Missions
The first mission we flew was not successful though – Freddy crashed on the first flight really bad, so we had to thank him for the long time he had served as and say goodbye to him!

But that didn’t stop us – we found a very nice place for further missions and started with the next plane – and this was very successful.
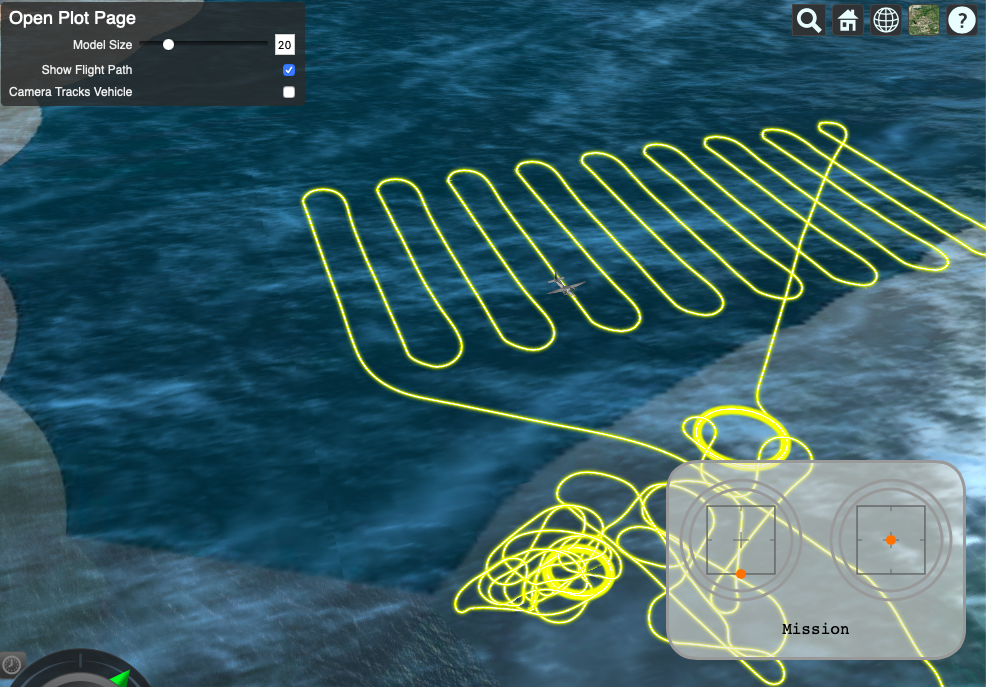
We found a perfect place to run our over-land missions – the horse race track in Gozo. The missions were very good – the precession of the flights was very good – check the track from the mission in the pics below – the plane had flown the round 10 times, still the track looks like one.

preparing Freddy for his last mission 

10 times the same round – still looks like one! 
The Gozo horse race track – perfect for our missions 
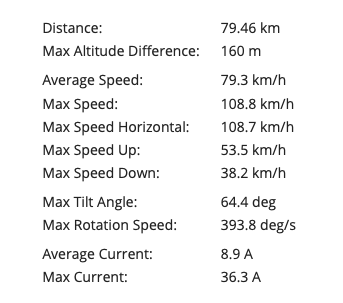
We also tested the endurance – and this was very good – we could fly aver 80km on a single battery with still 30% of capacity left.
Also the high wind during the mission was no problem, neither during the start, nor during the flight. Landing turned out not so easy – at least with auto-landing pattern in PX4. So we switched to manual landing – and that worked out good!
Sea Mission
As the land test worked out well several times, we decided to go to the main test – fly a long mission over the sea, search the sea with a survey pattern, land in the sea and get the plane from a ship.
Initially we had some problems with the plane – the motor didn’t work as expected. One of the cables was broken. As this was waterproof version of SearchWing, we had to think of a fast to fix it. Me decided on making a “by-pass” for the power cables. Not nice, but worked very nice and reliable!

making the plane waterproof 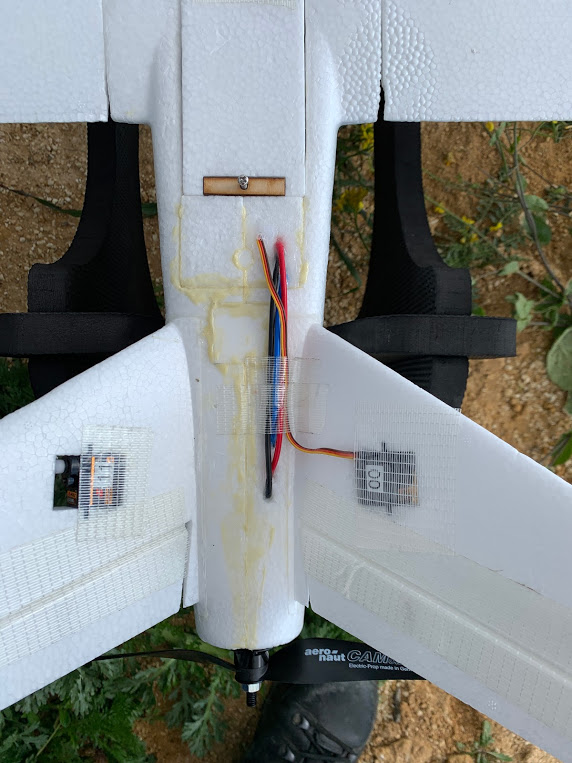
The motor power by-pass 
landing… 


Catch of the day – a fresh SearchWing! 
On the next missions we also tested the maximum distance with the telemetry – which was 10km – great! And this was with the telemetry power only to 10% of the maximum 1 Watt!
We also had a mission with strong winds (> 50km/h) which also proved to be no problem for our plane!
Finally…!
In the end we reached all the goals we wanted to reach. It was close on some of the missions, but we could verify all of our assumptions in the field:
- Covering a large enough area
- Good picture quality
- simply to use
- working well over the sea – also with strong winds
- water-proof design and safe water landing